搜索查詢
EL-AIcar自(zì)動駕駛算(suàn)法平台
系統功能(néng)概述
EL-AIcar自(zì)動駕駛算(suàn)法競賽平台是真正的智能(néng)車或是輪式機器人,它在傳統智能(néng)車的基礎上(shàng)通過搭載功能(néng)強大(dà)的導航計(jì)算(suàn)機,由導航計(jì)算(suàn)機連接深度攝像機來(lái)實現(xiàn)人的雙眼功能(néng),由導航計(jì)算(suàn)機連接的激光雷達對(duì)場景掃描并通過軟件建模來(lái)判定障礙物位置從(cóng)而實現(xiàn)自(zì)主導航。
導航計(jì)算(suàn)機是以ubuntu爲操作(zuò)系統,并在其上(shàng)的運行機器人的ROS系統,該ROS系統可挂接機器人建模軟件來(lái)仿真設計(jì)各類機器人,也(yě)可挂接仿真軟件來(lái)驗證相關識别算(suàn)法或控制算(suàn)法從(cóng)而較爲直觀地看(kàn)到(dào)機器人模拟的運行狀态,爲真實機器人的設計(jì)與控制提供完備的理(lǐ)論基礎。同時(shí)ROS系統還可以與OPENCV、TensorFlow等視(shì)頻圖像識别軟件進行數據交互,将其AI的視(shì)覺功能(néng)發揮到(dào)極緻。
車體控制單元部分采用(yòng)基于ARM Cortex-M4 内核的STM32F407處理(lǐ)器,主要完成電源管理(lǐ)、電機控制及測速、紅(hóng)外(wài)或超聲波避障、IMU姿态解算(suàn)及GPS定位功能(néng)。車體控制單元通過相應接口與做AI控制的導航計(jì)算(suàn)機相連,實現(xiàn)導航所用(yòng)數據上(shàng)傳及接收導航計(jì)算(suàn)機控制指令。同時(shí)引出407所有的GPIO引腳到(dào)排針,方便用(yòng)戶DIY。
系統結構及硬件資源
|
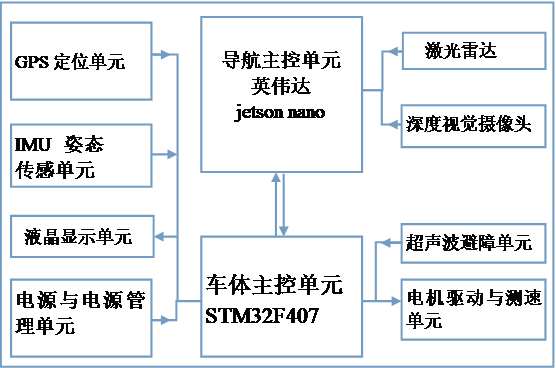
無人駕駛競賽平台可分爲室内競賽平台與室外(wài)競賽平台,室内平台采用(yòng)英偉達Jetson nano帶GPU的4核A57處理(lǐ)器,可自(zì)行加裝語音(yīn)控制單元進行控制。采用(yòng)真實的四輪電動代步車平台,搭載高(gāo)性能(néng)計(jì)算(suàn)機、高(gāo)速激光雷達與GPS單元。其硬件系統結構框圖如下(xià)所示。
整車采用(yòng)Coretx-M4内核的STM32F407ZE作(zuò)爲主控制器,同時(shí),在小(xiǎo)車上(shàng)有豐富的外(wài)圍擴展資源(如:電機控制、無線通信、液晶顯示以及各種傳感器模塊等),它可以搭配多種傳感器,自(zì)身即可完成無人駕駛智能(néng)傳感小(xiǎo)車的基本功能(néng)(包括小(xiǎo)車前進、後退、轉彎、避障等)、也(yě)可以自(zì)動駕駛(包括循迹自(zì)動駕駛、感應卡路徑自(zì)動駕駛、GPS導航自(zì)動駕駛等)、同時(shí)可實現(xiàn)無線通信(ZIGBEE、藍牙等無線通信控制小(xiǎo)車方向)。 |
自(zì)動駕駛算(suàn)法平台小(xiǎo)車系統框圖 |
軟件配置
1、ubuntu操作(zuò)系統。
2、機器人ROS系統。
3、無線遙控手柄,可實現(xiàn)不低(dī)于1km無線遙控。
4、移動端app可實現(xiàn)手機遙控和(hé)姿态遙控。
主要硬件參數說明(míng)
車身結構
車身采用(yòng)全鋁合金(jīn)支架,帶有擺式與獨立懸挂,外(wài)型尺寸(長X寬445*358MM),采用(yòng)直徑125mm實心輪。
采用(yòng)直流有刷電機(功率達35W),減速比1:27,最大(dà)速度1.3m/S,額定負載能(néng)力10Kg。帶有500線AB相光電編碼器。
帶有阿克曼結構轉向功能(néng),采用(yòng)數字舵機、金(jīn)屬齒輪。舵機最大(dà)角度180°,工(gōng)作(zuò)電壓4.8-7.4V,扭力20Kg.cm。
采用(yòng)共軸擺式懸挂,可适應不平地面。
車身四周有四組超聲波測距模塊,采用(yòng)HY-SRF05 超聲波測距模塊,2cm-450cm 的非接觸式距離感測功能(néng), 測距精度可達高(gāo)到(dào)3mm
帶有GPS定位系統:56通道(dào),GPS L1(1575.42Mhz) C/A碼,定位精度: 2.5mCEP(SBAS:2.0mCEP),通信協議(yì): NMEA(默認)/UBX Binary ,SBAS:WAAS/EGNOS/MSAS,更新速率: 最大(dà)5Hz(默認1HZ)。
激光雷達:思岚A1
測距範圍:0.15-12m,基于白(bái)色高(gāo)光反色物體測得;
掃描角度:0-360;
測距分辨率:當測量物體在1.5米範圍内分辨率爲小(xiǎo)于0.5mm;否則分辨率小(xiǎo)于實際距離的1%;
測量頻率:2KHz-8KHz;
掃描頻率1-10Hz;
供電:5V
視(shì)覺相機:Astra pro
深度範圍:0.6-8m;
功耗:≤2.5W,峰值電流小(xiǎo)于500ma;
彩色圖分辨率:1280x720@30FPS;640x480@30FPS;320x240@30FPS;
深度圖分辨率:1280x1024@7FPS;640x480@30FPS;320x240@30FPS;160x120@30FPS;
精度:距離物體1m時(shí),±1-3mm;
彩色FOV:H66.1’ V40.2’;
深度FOV:H58.4’ V45.5’;
數據傳輸:30-45ms;
供電:USB 5V
英偉達jetson nano B01:
CPU:ARM Coretex-A57 64-bit ,主頻1.43Ghz;4核,
GPU:128-core Maxwell @921Mhz;
内存:4 GB 64-bit LPDDR4 25.6 GB/s;
存儲:可擴展microSD卡,要求最小(xiǎo)16GB UHS-1(超高(gāo)速接口,帶寬能(néng)達到(dào)至少104Mb/s)
視(shì)頻編碼:H.264/H.265(4Kp30)
視(shì)頻解碼:H.264/H.265(4Kp60,2**4Kp30)
攝像輸入接口:MIPI CSI
攝像輸出接口:2個HDMI 2.0,Edp1.4
網絡接口:Gigabit Ethernet/M.2 Key E
USB:4個 USB 3.0, USB 2.0 Micro-B
GPIO引腳:40
額定功率:5w/10w
供電:5V
電池采用(yòng)22.2V 5000ma帶保護電池,續航能(néng)力約5小(xiǎo)時(shí)(電池容量可選)
車體主控STM32F407ZE:
CPU:支持最大(dà)主頻爲168 MHz的ARM Cortex-M4内核
内存:1024KByte FLASH,192+4KByte SRAM
LQFP-144封裝。
4個傳感器接口,可擴展20多種傳感器。
1個4.3寸TFT液晶,分辨率480*272。
1組無線通信總線,可擴展Zigbee、CC1310、藍牙通信。
外(wài)設資源包括6個USART、12個16位的定時(shí)器、2個32位定時(shí)器、2個DMA控制器(16通道(dào))、3個SPI、2個全雙工(gōng)I2S、3個I2C、2個CAN、3個12位ADC、2個12位DAC、SDIO、1個FSMC接口、2個USB(支持HOST/SLAVE)、1個攝像頭接口、1個硬件随機數生成器以及1個10/100M以太網控制器等
可開(kāi)設的實驗項目
| 基于AI CPU系統深度學習算(suàn)法實驗 | |||
| 實驗01 構造線性回歸模型 | 實驗02 邏輯回歸框架 | 實驗03 叠代完成邏輯回歸模塊 | 實驗04 神經網絡模型架構 |
| 實驗05 訓練神經網絡 | 實驗06 卷積神經網絡模型架構 | 實驗07 RNN網絡模型 | 實驗08 循環神經網絡LSTM |
| 實驗09 雙向循環神經網絡 | 實驗10 動态循環神經網絡 | 實驗11 對(duì)抗生成網絡 | 實驗12 目标識别 |
| 實驗13 自(zì)編碼器 | |||
| 基于AI CPU系統應用(yòng)實驗 | |||
| 實驗01 GoogleNet物體識别 | 實驗02 FaceNet120人臉檢測 | 實驗03 神經網絡Lenet模型 | 實驗04 手語識别 |
| 實驗05 色塊跟蹤 | 實驗06 視(shì)覺建圖 | 實驗07 激光雷達建圖 | |
| 基本功能(néng)實驗 | |||
| 實驗一 小(xiǎo)車前進實驗 | 實驗二 小(xiǎo)車後退實驗 | 實驗三 小(xiǎo)車左轉實驗 | 實驗四 小(xiǎo)車右轉實驗 |
| 實驗五 自(zì)動避障實驗 | |||
| 自(zì)動駕駛實驗 | |||
| 實驗一 循迹自(zì)動駕駛實驗 | 實驗二 GPS導航自(zì)動駕駛實驗 | ||
| 無線通信實驗 | |||
| 實驗一 無線通信控制方向實驗 | |||
| 傳感器實驗 | |||
| 實驗一 繼電器實驗 | 實驗二 光照度實驗 | 實驗三 溫濕度實驗 | 實驗四 紅(hóng)外(wài)測溫實驗 |
| 實驗五 氣壓計(jì)實驗 | 實驗六 攝像頭實驗 | 實驗七 GPS實驗 | |
産品參考圖片

-
-
-
聯系我們
服務時(shí)間:9:30 — 6:30
聯系電話(huà):
-

-
聯系或咨詢我們
咨詢熱線:
手機:
深圳市龍崗區(qū)龍城(chéng)街道(dào)黃閣社區(qū)京基禦景時(shí)代大(dà)廈南區(qū)904A
掃碼關注
Copyright © 2021 深圳仲元教育科技有限公司 版權所有 | SEO标簽